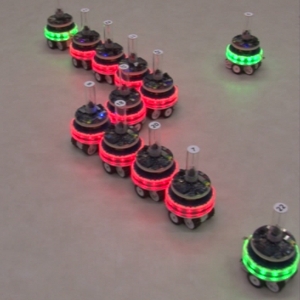
Flocking refers to the cohesive and aligned motion of a group of individuals in a common direction. In the context of flocking, we developed two sets of methods for transferring information within a swarm of mobile robots moving in a coordinated fashion.
In the first set, we consider information transfer via communication. We proposed novel communication mechanism and studied them on two different categories of problems.
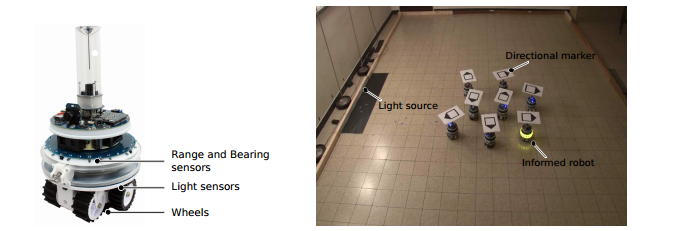
In the first category, there is only one desired goal direction at a given time, which can be static or can change over time.
Few robots are informed about this direction (informed robots), and need to spread the information to the entire group.
In the second category, we consider two different conflicting directions with different priorities. In this case, the information about the direction associated to the
highest priority must reach all the individuals of the swarm and the information transfer must happen without direct communication. Differently from previous results in the field, we first showed that the simple usage of a specific mechanism of motion is sufficient to guarantee cohesive and aligned motion without transferring directly information on orientations between the robots. Furthermore, the proposed motion mechanism enables indirect transfer of information about the desired direction from the informed to the non-informed robots in a setting with only one static goal direction.
All the achieved results have been validated both using the ARGoS simulator and with quantitative experiments on real robots.
Self-organized flocking with conflicting goal directions Ferrante E., Sun W., Turgut A.E., Dorigo M., Birattari M., Wenseleers T. - In Proceedings of the 12th European Conference on Complex Systems (ECCS), 2012
Explicit and implicit directional information transfer in collective motion
Ferrante E., Turgut A.E., Huepe C., Birattari M., Dorigo M. - In Proceedings of the 13th International Conference on the Synthesis and Simulation of Living Systems (Alife 13), MIT Press (editors), Pages 551-577, Volume 13, 2012
Self-Organized Flocking with a Heterogeneous Mobile Robot Swarm
Stranieri A., Ferrante E., Turgut A.E., Trianni V., Pinciroli C., Birattari M., Dorigo M. - In Proceedings of the Eleventh European Conference on the Synthesis and Simulation of Living Systems (ECAL 2011), T. Lenaerts et al. (editors), MIT Press, Pages 789-796, 2011
In a robot swarm self-assembly is the ability of robots to physically attach to each other so that they can collectively perform tasks that are beyond their individual capabilities.
In order to achieve self-assembly, we make use of a state-of-the-art communication devices together with a recruitment algorithm.
A robot inviting a physical connection actively recruits the neighbour robot that is best located with respect to where the connection is required and guides the recruit to the connection location on its chassis. The proposed mechanism relies on local, high-speed communication between connection inviting robots and their recruits. Communication is based on a hybrid technology that combines radio and infrared to provide local relative positioning information when messages are transmitted between adjacent robots. Experiments with real robotic hardware show that the proposed mechanism is precise, robust, and fast. We show how the speed and precision of this approach enable adaptive recruitment and connection in dynamic environments, a high degree of parallelism, and growth of a compound entity in motion. In our ongoing research, we use the communication technology to let connected robots share their environmental perception with adjacent robots allowing them to update their beliefs about the environment and to coordinate their collective motion.
Spatially targeted communication in swarms of heterogeneous robots
Recently, heterogeneous multirobot systems composed of unmanned aerial vehicles (UAVs) and ground-based robots have seen a surge of research interest. This is mainly because in such systems the limited environmental perception resulting from the vantage point of ground-based robots can be overcome by UAVs that can provide both an unobstructed field of view and rapid coverage of an environment. Often UAVs in such systems need to send tailored instructions to particular robots on the ground based on their position in the environment. However, such selective communication is non-trivial in missions in which the swarm does not share a common frame of reference or GPS and a priori knowledge of the environment are unavailable. We propose spatially targeted communication as a method to allow a single robot to establish a dedicated communication link with one or more co-located robots using broadcast messages only. Our approach relies only on standard LEDs and cameras and does not require any specialized hardware. Spatially targeted communication is therefore ideally suited for large swarms of robots. We use a heterogeneous swarm composed of UAVs and ground-based self-assembling robots as a case study to apply spatially targeted communication. We show that the range of tasks that can be solved by self-assembling robots can be extended by cooperation with UAVs through spatially targeted communication.
Spatially Targeted Communication and Self-Assembly
Mathews N., Christensen A.L., O'Grady R., Dorigo M. - In Proceedings of the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2012), IEEE Computer Society Press, Pages 2678-2679, 2012
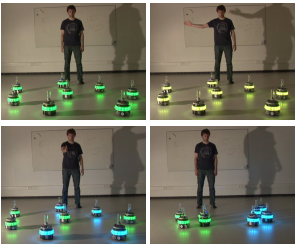
Self-organised feedback in human swarm interaction
Human-swarm interaction (HSI) consists of bidirectional interaction between a human operator and swarms of autonomous robots. In HSI, a human operator controls robots to carry out tasks. However, in order to control a swarm of robots, the operator must receive appropriate feedback about what is going on in the swarm. This feedback helps the operator to choose the appropriate command to issue to the swarm. The main challenge when trying to interact with a swarm of robots is the huge difference in perspective between the human operator and the swarm. Each individual is not aware of the global behavior of the swarm and has only a limited knowledge of its environment. On the other hand, the human operator only needs to receive a big picture of what is going on. Therefore, the robots must self-organise in order to provide the operator a single information that depicts the swarm's status.