Self-organized decision making in swarms of robots
Collective decision making methods enable a swarm of robots to reach forms of consensus that may be associated to a certain set of actions.
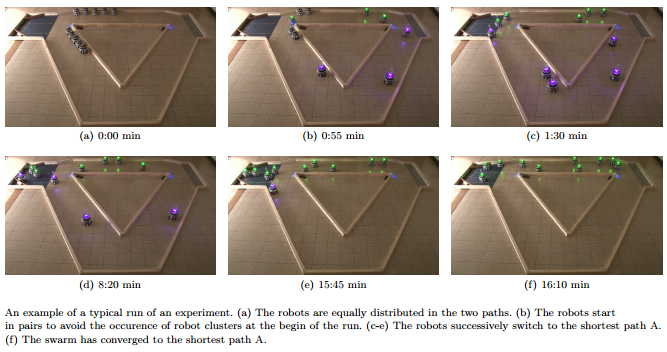
In Nature, we find similar distributed decision processess in ant colonies, where ants are able to collectively choose the shortest path from the nest to a food source or in bee colonies where bees show the capability to collectively select a good nest site from a number of candidates.
Similarly, in swarm robotics good decisions must be taken collectively by the robots by using only local information. In this case, the decision making process must be efficient, robust with respect to failures, and must scale with the size of the swarm. A central question is how the consensus on the best action can emerge from initially heterogeneous information possessed by the robots.
We study analytical models of decision making methods in order to understand the dynamics of the consensus formation process and verify their applicability to real swarm robotics scenarios.
Analysing Robot Swarm Decision-Making with Bio-PEPA Massink M., Brambilla M., Latella D., Dorigo M. -
In Swarm Intelligence (ANTS 2012), M. Dorigo and others (editors), Springer-Verlag, Pages 25-36, Volume 7461, Lecture Notes in Computer Science, 2012
Costs and benefits of behavioural specialization in swarms of autonomous robots
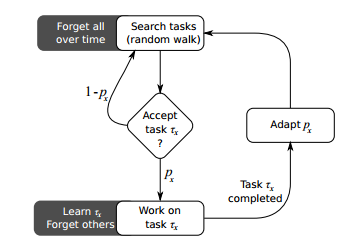
A common way to obtain division of labour in a group of autonomous agents is by letting individuals develop preferences towards a subset of the tasks available in the environment.
When individuals are able to learn how to perform a task more efficiently over time, the so-called behavioural specialization is known to increase the performance of the group.
Specialization, however, also entails costs.
The understanding of the costs and benefits of behavioural specialization is especially important in swarm robotics since it leads to the design of swarms that are able to perform tasks faster and more efficiently. We develop mathematical models and high-level computer simulations in order to understand when behavioural specialization should be used and the role of environmental conditions on the performance of robotics swarms adopting behavioural specialization.
In this context, for instance, certain learning models can be modeled by a special class of stochastic processes called self-interacting Markov chains.
When this is possible we analyze the long time properties of behavioural specialization by using theoretical results developed in the field probability theory.
Costs and Benefits of Behavioral Specialization Brutschy A., Tran N., Baiboun N., Frison M., Pini G., Roli A., Dorigo M., Birattari M. -
Robotics and Autonomous Systems, Volume 60, Number 11, Pages 1408 -1420, November, 2012
Costs and Benefits of Behavioral Specialization
Brutschy A., Tran N., Baiboun N., Frison M., Pini G., Roli A., Dorigo M., Birattari M. -
In Towards Autonomous Robotic Systems - 12th Annual Conference, TAROS 2011, Springer Verlag, Pages 90-101, Volume 6856, Lecture Notes in Computer Science, 2011
Measuring and estimating the performance of swarm robotics systems
Swarm robotics systems will hardly be accepted in real-world scenarios until precise quality
specifications and strict performance and reliability guarantees can be provided.
The same characteristics that make swarm robotics systems so promising (i.e., parallelism of the operations, robustness to failures, robustness to environmental disturbances and decentralized control) render the assessment of their performance extremely difficult.
For these reasons, we are performing an extensive investigation of probabilistic methods for the characterization of quality-related properties of swarm robotics systems.
One of these methods consists in identifying specific classes of stochastic processes whose analytical properties can be associated to certain performance characteristics. This allows the designers to focus on the task of building robotics controllers that generate the dynamics associated to a specific stochastic process, instead of searching in the space of all the possible robotics controllers those that satisfy performance constraints. We investigate the approach in relation to performance characteristics such as power consumption, total activity time and amount of work performed by a swarm robotics system with and without spatial interferences.